个人简介
学习经历: l 2013.09~2017.06,南开大学,自动化,工学学士学位 l 2017.09~2022.06,南开大学,控制科学与工程,工学博士学位 工作经历: l 2022.07~2024.12,南开大学,讲师 l 2025.01~至今,南开大学,副教授/南开大学深圳研究院,副研究员 主要研究方向为欠驱动机器人(包括桅杆式吊车,船用吊车,塔式吊车等)、肌肉骨骼仿生机器人、消防机器人集群系统智能决策与控制、基于强化学习的智能控制及应用等。 近年来,以一作/通讯发表/录用SCI/EI论文30余篇,其中23篇IEEE Transactions,8篇入选ESI热点/高引;科学出版社出版专著(排名2);授权/受理专利7件及软著2项;连续两年入选斯坦福大学全球前2%顶尖科学家。入选中国科协青年人才托举工程,主持国家自然科学基金青年科学基金项目及2项省部级面上项目,获国家级/省部级奖励/荣誉30余项,包括天津市自然科学二等奖(排名2)、天津市科技进步二等奖(排名3)、中国人工智能学会优博论文奖(每年本领域仅10项)、中国自动化学会优博论文奖(每年本领域仅10项)、IEEE RCAR最佳控制论文奖、机器人顶会IROS Workshop最佳论文奖、天津市青年科技工作者协会优秀青年科技工作者、天津市知识产权创新创业发明与设计大赛一等奖、天津机器人科技创新奖等,“全国高校黄大年式教师团队”成员。 科研方向: 方向1:欠驱动机器人智能控制 
方向2:欠驱动机器人智能控制 
方向3:消防机器人(集群)系统感知、决策、规划与智能控制 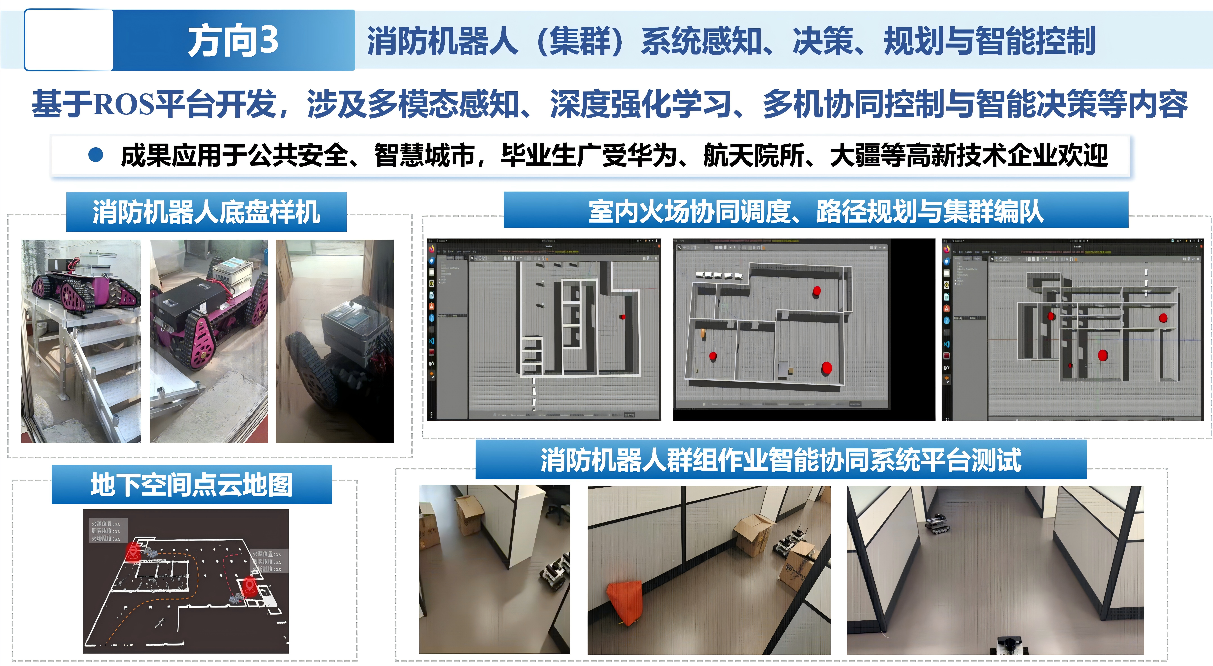
团队优势: 课题组经费充足、氛围融洽,在发表论文、撰写专利、参加机器人比赛方面积累了丰富的经验! 申请要求: 想提前进入实验室实习、攻读研究生的同学请与我联系,yangt@nankai.edu.cn,欢迎人工智能、自动化、机械等相关专业学生。 对南开感兴趣的外校同学也可以提前进入课题组学习,熟悉导师,线上线下结合,为保研/考研做准备! |
科研项目、成果、获奖、专利 科研项目: 近年来,主持国家自然科学基金青年科学基金项目、天津市面上项目、广东省面上项目、南开大学“学科振兴计划”等,并作为执行负责人参与国家自然科学基金重点项目(1项)、联合基金重点项目(1项)、面上项目(2项)、国家重点研发计划课题(2项)等。 1. 国家自然科学基金青年科学基金项目,2024.01-2026.12,主持。 2. 广东省基础与应用基础研究基金自然科学基金-面上项目,2025.01-2027.12,主持。 3. 天津市自然科学基金-面上项目,2024.10-2027.09,主持。 4. 天津市津南区科技计划项目,2023.11-2024.10,主持。 5. 湖北省重点实验室开放课题,2023.10-2025.09,主持。 6. 国家自然科学基金区域创新发展联合基金(河北)重点支持项目,2021.01-2024.12,参与。 7. “十四五”国家重点研发计划重点专项项目课题,2023.01-2026.05,参与。 8. “十三五”国家重点研发计划重点专项项目课题,2019.06-2022.05,参与。 荣誉/奖励: 基于在智能吊运、仿生机器人自主作业/人机交互、消防机器人集群编组/协同作业等关键技术与应用方面取得的成果,获国内外奖励/荣誉30余项以及国内外会议优秀/最佳/杰出论文奖9项,代表性奖励列举如下: l 2025年,中国科协第十届青年人才托举工程 l 2024年,2023年度天津市自然科学二等奖(排名2) l 2025年,2024年度天津市科技进步二等奖(排名3) l 2025年,中国人工智能学会(CAAI)博士学位论文激励计划(原吴文俊人工智能科学技术奖优秀博士学位论文奖) l 2025年,中国自动化学会(CAA)研究生论文工程-博士论文一等学位论文 l 2024年,天津市青年科技工作者协会优秀青年科技工作者 l 2023年,IEEE RCAR Best Paper in Control Award(最佳控制论文奖,排名1) l 2023年,日内瓦国际发明展铜奖(日内瓦国际发明展是世界三大发明展之一,40余个国家的1000多个项目评出) l 2025年,全国高校自动化类专业青年教师实验设备设计“创客大赛”金奖 l 2025年,机器人顶会IROS 2025 Workshop 最佳论文奖 l 2023年,南开大学优秀博士学位论文 l 2019年,第五届中国“互联网+”大学生创新创业大赛全国总决赛金奖 l 2017年,第十五届“挑战杯”全国大学生课外学术科技作品竞赛一等奖 l 2022年,指导学生获华北五省(市、自治区)大学生机器人大赛(决赛)一等奖,获评优秀指导教师 l 2023年,指导学生获中国国际“互联网+”大学生创新创业大赛天津市铜奖(2项) l 2023年,指导学生获“挑战杯”中国银行天津市大学生课外学术科技作品竞赛二等奖 l 2024年,指导学生获中国国际大学生创新大赛(2024)天津赛区高教主赛道铜奖 发明专利: 作为主要发明人获授权/受理国家发明专利7件,登记软著4项。 |
撰写论文、专著、教材等 以一作/通信发表本领域SCI期刊论文近30篇(包括IEEE汇刊23篇),其中8篇入选ESI热点/高被引;出版专著2部(其中1部出版于科学出版社,排名2)。代表性成果如下: [1] Tong Yang, et al., Neural network-based adaptive antiswing control of an underactuated ship-mounted crane with roll motions and input dead zones, IEEE Transactions on Neural Networks and Learning Systems, 2020. [中科院一区TOP,(曾)同时入选ESI热点+高引论文] [2] Tong Yang, et al., Adaptive fuzzy control for a class of MIMO underactuated systems with plant uncertainties and actuator deadzones: Design and experiments, IEEE Transactions on Cybernetics, 2022. [中科院一区TOP,(曾)同时入选ESI热点+高引论文] [3] Tong Yang, et al., New adaptive control methods for n-link robot manipulators with online gravity compensation: Design and experiments, IEEE Transactions on Industrial Electronics, 2022. [中科院一区TOP,(曾)同时入选ESI热点+高引论文] [4] Tong Yang, et al., Observer-based nonlinear control for tower cranes suffering from uncertain friction and actuator constraints with experimental verification, IEEE Transactions on Industrial Electronics, 2021. [中科院一区TOP,(曾)入选ESI高引论文] [5] Tong Yang, et al., Adaptive fuzzy control for uncertain mechatronic systems with state estimation and input nonlinearities, IEEE Transactions on Industrial Informatics, 2022. [中科院一区TOP,(曾)入选ESI高引论文] [6] Tong Yang, et al., Neuroadaptive control for complicated underactuated systems with simultaneous output and velocity constraints exerted on both actuated and unactuated states, IEEE Transactions on Neural Networks and Learning Systems, 2023. [中科院一区TOP,引用次数>100] [7] Tong Yang, et al., Adaptive neural network output feedback control of uncertain underactuated systems with actuated and unactuated state constraints, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022. [中科院一区TOP,引用次数>100] [8] Tong Yang, et al., Adaptive optimal motion control of uncertain underactuated mechatronic systems with actuator constraints, IEEE/ASME Transactions on Mechatronics, 2023. [中科院一区TOP,引用次数>100] |
